MechaRaptor
 © Thomas Lambert
© Thomas Lambert
MechaRaptor: Experimental Analysis of Medium-Scale Tandem Flapping Wings
MechaRaptor is an innovative experimental setup designed for the in-depth analysis of medium-scale tandem flapping wings systems, serving as a cornerstone experimental component of my PhD thesis. This project is motivated by the burgeoning interest in UAV systems and bio-inspired drones, particularly in the context of flapping and tandem wing configurations.
Amidst the prevailing focus on low Reynolds numbers characteristic of insect-scale models or low-flapping frequencies at larger scales, the research at higher Reynolds numbers remains underexplored. MechaRaptor seeks to bridge this research gap by examining the aerodynamic characteristics of medium-scale tandem flapping wings operating at moderate frequencies (up to 5Hz).
Experimental Setup
The analysis employs thorough wind tunnel tests across a spectrum of wing geometries, exploring various positions, flapping frequencies, and phases between dual wing sets, without active pitch control but allowing for pre-set pitching angles.
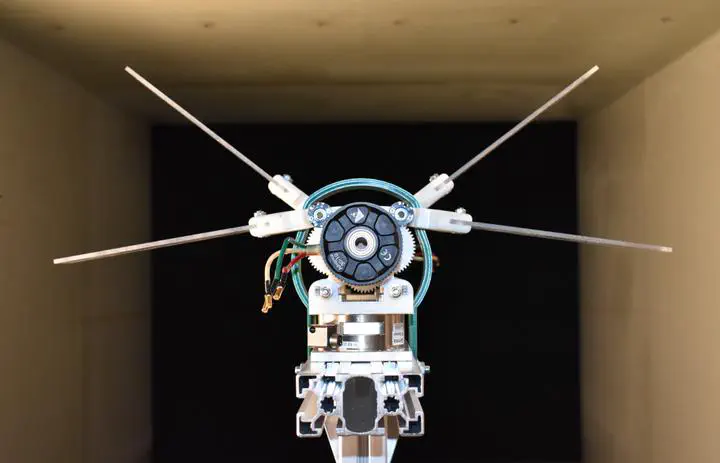
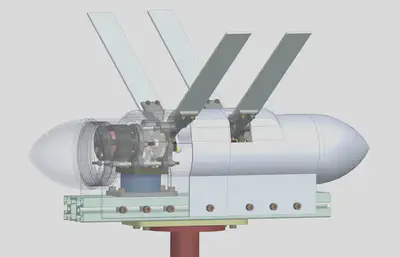
MechaRaptor features two independently controlled sets of wings, each mounted on a 6-axis load sensor to accurately measure aerodynamic forces. Rotary encoders on each wing capture the flapping angle in real-time, enabling a precise correlation between measured forces and flapping dynamics. This data integration facilitates accurate numerical simulation of the experiments using the unsteady vortex lattice method, enhancing our understanding of tandem flapping wing aerodynamics at medium scales.
Project roadmap
| Status | Item |
|---|---|
| Done | Model design, manufacturing and assembly |
| Done | Wind tunnel campaign 1 (flat rectangular wings) |
| Done | Results presentation @ SciTech 2023 |
| Done | Wind tunnel campaign 2 (NACA airfoils) |
| In progress | Result analysis and comparison with UVLM |
Results
Preliminary results obtained with flat rectangular wings were presented at the AIAA SciTech Forum 2023.
In the spirit of the open-science movement, the raw datasets, as well as the data-processing codes are available:
- Data - Wind Tunnel 1
- Data - Wind Tunnel 2 (EMBARGO UNTIL JUNE 2024)
- Data processing codes
Additional info
- The code for the Arduino controller and the real-time visualization template is available here.
- The (incomplete) documentation to operate and configure the flapper is available here.
- Media (photos, videos) related to the wind tunnel tests can be obtained upon request.
- CAD parts (in STEP format) will be shared once a suitable sharing platform has been found. In the meantime, I can share them upon request.
Thomas Lambert
PhD Candidate in Aerospace Engineering
I am currently engaged in research on unsteady aerodynamics, focusing on numerical analyses and experimental studies for multi-body systems. My primary applications are in developing coaxial rotor systems and understanding the physics of tandem flapping systems, mainly to improve drone technology.

